
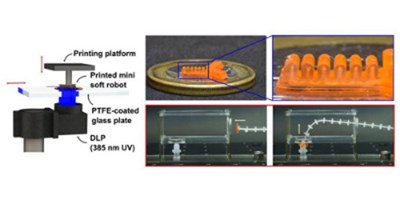
Singapore University of Technology and Design, Southern University of Science and Technology and Zhejiang University researchers’ proposed process flow guides 3D printing of miniature soft pneumatic actuators. Integrating the prints into a robotic system offers potential applications in jet-engine maintenance and minimally invasive surgery.
Soft robots are a class of robotic systems made of compliant materials and capable of safely adapting to complex environments. Small soft robots at millimeter-scale are of practical interest as they can be designed as a combination of miniature actuators simply driven by pneumatic pressure. They are also well suited for navigation in confined areas and manipulation of small objects.
However, scaling down soft pneumatic robots to millimeters results in finer features that are reduced by more than one order of magnitude. The design complexity of such robots demands great delicacy when they are fabricated with traditional processes such as molding and soft lithography. Although emerging 3D printing technologies like digital light processing (DLP) offer high theoretical resolutions, dealing with microscale voids and channels without causing clogging has still been challenging. Indeed, successful examples of 3D printing miniature soft pneumatic robots are rare.
In DLP 3D printing, photo-absorbers are commonly added into polymer solutions to enhance the printing resolutions in both lateral and vertical directions. Meanwhile, overly increasing the dose leads to rapid degradation in the material’s elasticity which is crucial for soft robots to sustain large deformations.
To exemplify the potential applications, the researchers also devised a soft debris remover comprising a continuum manipulator and a 3D printed miniature soft pneumatic gripper. It can navigate through a confined space and collect small objects in hard-to-reach positions.